Plotting the constraint equation
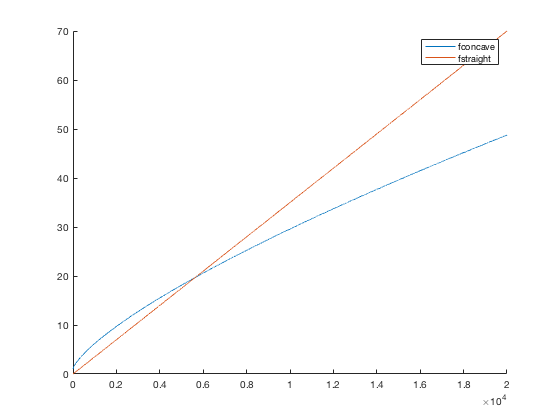
This function plots the constraint equation. It separates the constraint equation in 2 parts - the concave and straight line part, their intersection is the root of the constraint equation
it_k_n = 20000; fl_phi = 1; fl_alpha = 0.6; fl_theta = 0.79 -fl_alpha; fl_kappa = 0; fl_delta = 0.1; fl_r = 0.04; fl_w = 1.8; fl_R = fl_r + fl_delta; fl_ahi = 100; fl_a = 1; fl_z = 1; ar_k = linspace(0, 5*fl_ahi, it_k_n); % Grid of capital to search for roots of constraint equation (order = 1 X it_k_n) f_lmax= @(z,k) (fl_w./((k.^fl_alpha).*fl_theta.*z)).^(1/(fl_theta - 1)); % max l for a given constrained k f_con_concave = @(a,z,k) fl_phi.*((k.^fl_alpha).*z.*(f_lmax(z,k)).^fl_theta - fl_w.*(f_lmax(z,k)))-(1+fl_r)*fl_kappa.*ones(numel(a),it_k_n)+(1+fl_r).*(a).*ones(1,it_k_n); % concave part of the constraint function f_con_straight=@(a,z,k) (1-fl_phi).*(1-fl_delta).*ones(numel(a),1).*k+fl_R.*ones(numel(a),1).*k; % straight line part of the constraint function f1 = f_con_concave(fl_a, fl_z, ar_k); f2 = f_con_straight(fl_a, fl_z, ar_k); figure(1) hold on a1 = plot(f1); M1 = "fconcave"; a2 = plot(f2); M2 = "fstraight"; legend([a1,a2], [M1, M2]); hold off saveas(gcf, '/Users/sidhantkhanna/Documents/GitHub/BKS modified/code/Firms/figures/con_kl/plotconkl.png')